Hola a todos! hoy comienzo este nuevo proyecto de construcción de un quadcopter, multicopter o quadrotor casero. Mi intención es hacerlo de la forma mas barata posible aunque ello me ocasione alguna dificultad añadida. Mi intención es crear un aparato de vuelo autónomo con autonivelación y control desde una app de android, como ya he dicho no pretendo gastar excesivo dinero e el proyecto porque para eso me lo compro ya hecho. Aquí compartiré todo el proceso desde la compra de los materiales necesarios como el montaje y programación de los mismos, si alguno de ustedes está haciendo el mismo proyecto les agradecería comenten sus experiencias y avances en la parte de abajo del post para aquellos que necesiten información.
Lo primero que se necesita es un "cerebro" low cost, obio, que se encargue del procesamiento de los datos. Leyendo por ahí e investigando me he encontrado de todo, así como: ardupilot, kk2, pixhawk, todos con un precio bastante elevado el cual se sale del presupuesto, asi que me decanté por un arduino nano con usb integrado al precio de unos 3 dolares como mucho comprado en ebay.com. De éstos harán falta dos, uno para el quad y otro para el mando o emisora.
Esta pequeña plaquita será suficiente para el cometido, Funciona a 16Mhz con voltajes de 3,3 y 5V 8 pines anlógicos, 13 digitales y conexión icsp rx y tx con bootloader incluido en la placa. La verdad es que no se le puede pedir mas a 3 dolares. ¿Cual montan o montarán ustedes?
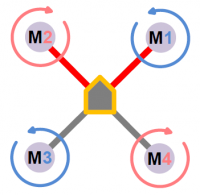
Lo segundo a tener en cuenta es dónde van a montar los componentes, el marco. Los hay desde 3 hasta 10 brazos, desde fibra de carbono hasta aluminio que valen hasta 100 machacantes, los tamaños mas habituales son los pequeños 250 y los grandes 450. Yo he elegido montar un 450 de 4 brazos con 4 motores dispuestos en X. Si comprarlo o montarlo yo mismo no lo tengo muy claro aún, aunque lo suyo sería montarlo con chatarras. Los motores han de girar a pares en direcciones opuestas para que el aparato no se ponga a dar vueltas como loco, deben montarse de ésta manera:
Lo tercero a tener en cuenta son como no...
Los motores. Éstos han de ser sin escobillas (brushless) y se miden en KV, cuantos más kv mas velocidad pero menos par, es decir un motor de 2000KV alcanzará más velocidad que uno de 1000KV pero soportará menos peso, por lo que la aceleración o la respuesta a la hora de hacer giros o maniobras será más rápida en el de 2000KV que en el de 1000, esto hay que tenerlo en cuenta a la hora de elegir qué tipo de dron queremos hacer y el peso final del mismo. En mi caso pretendo montarle una go pro o algún módulo de cámara compatible con arduino así que tendré que sumarle unos cuantos gramos a la ecuación. Yo he elegido éstos de 1000Kv, se venden es subasta con los adaptadores y esc (del que hablaré más adelante).
Todo esto no funcionaría sin energía así que el cuarto punto es
La Batería. Por sus características las más utilizadas son las de polímero de litio (LiPo) que son ligeras y "duran", pero si el peso no lo es todo y han tenido radiocontroles anteriormente habrán visto esas que son como pilas empaquetadas en un plástico, esas también les servirán, e incluso baterías de móviles celulares conectadas entre sí. Lo suyo es conseguir más de 11 voltios y más de 2000mA.
_____________________________________________________
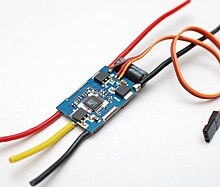
La placa arduino no posee potencia suficiente para controlar directamente los motores, por ello son necesarios los ESC (electronic speed control). Éstos cogen energía de la batería y según la señal que provenga de la placa dejan pasar más o menos energía hacia los motores haciéndolos girar más o menos rápido independientemente.
Si queremos que nuestro aparato realice un vuelo autónomo y se mantenga estable en el aire necesitaremos equipar sensores de movimiento (IMU), así como los smartphones, los mandos de wii, etc... Existen varios en el mercado de diferentes características según, hay que detectan solo desplazamiento lineal (3DOF) como desplazamiento angular (6DOF) hasta los que detectan la altura, presión atmosférica e incluso temperatura (9 y 10 DOF) Se encuentran a precios bajísimos en ebay.com.


Ahora le toca paso a la
radio, que es con lo que se controla el aparato normalmente ya que los módulos bluetooth ofrecen muy poco rango, La señal usada por estos aparatos de radio es de 2,4Ghz, tambien los hay de 5Ghz y de 500Mhz pero éstos crearían interferencias con las emisoras de vídeo FPV(first person view). La solución cara sería comprar una emisora con su respectivo receptor que saldría por un dineral, y como éste no es el caso, he optado por comprar en ebay dos módulos de radio nrf24l01 con antena SMA que ofrecen un radio de emisión de 1100 metros.
Para volar hacen falta
hélices, obio, existen hélices de muchos tamaños formas y materiales pero, ¿cual comprar? bien, si has elegido un motor de muchos Kv lo recomendable es utilizar hélices pequeñas de unas 5 o 6 pulgadas que se definen como 5030 o 6030, los primeros 2 números hacen referencia a la longitud y los 2 siguientes al ángulo del aspa. Por el contrario, para motores de Kv bajos se usan hélices grandes de 8 a 10 pulgadas, en mi caso con 1000Kv uso unas de 1045. ¡OJO! muy importante nivelar las hélices antes de volar (
ver video) por cierto, no es necesario el aparato que usan en el video, yo lo hice con un destornillador.
El montaje
Comenzamos a juntar las partes que compondrán el drone, se me ha hecho bastante largo debido a que pido las piezas de china, que salen muy baratas pero tardan en llegar. No he comprado un marco o estructura prediseñada, en su defecto he usado un viejo juguete de mi hermano que cumplirá bien con su finción, la verdad es que va como anillo al dedo. En este paso supongo que cada uno tendrá un "frame" distinto ya sea comprado o hecho a mano pero la colocación de los componentes es mas o menos la misma, es decir, motores en las puntas, esc en las patas y en el soporte central el resto de componentes.
Como ven en la foto he colocado el arduino donde instalaremos el software multiwii en la parte delantera, en el centro la placa de sensores, de este modo serán más precisas las lecturas, los esc atados con bridas y en el exterior de la base, lo que mejorará el flujo térmico porque estos aparatos se calientan bastante.
No se si se ve bien en la foto pero las conexiones son las siguientes:
Morado: 3,3v
Azul: Gnd
Verde: A5
Amarillo: A4
Vamos con los esc, donde necesitaremos un par de "apañitos" o gastar dinero en una placa de distribución de energía. Yo he juntado los pines 5v y Gnd en dos filas y he sacado un cable de cada fila.
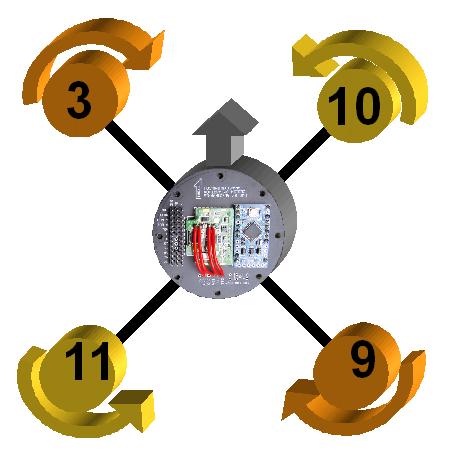
Le toca el turno a los motores, como en la imágen de abajo conectamos los cables blancos de cada esc en el siguiente orden:
Delantero izquierdo al 3
Delantero derecho al 10
Trasero izquierdo al 11
Trasero derecho al 9
Vamos conectando los módulos nrf24l01 +pa la na a los 2 arduinos que usaremos como emisora y receptor del siguiente modo:
1:Gnd
2:Vcc 3,3v
3:D9
4:D10
5:D13
6:D11
7:D12
Según las especificaciones para que la señal sea más estable se recomienda poner un capacitor de entre 3,3uF a 10uf entre Vcc y Gnd